ЯъНтMEMSЙпадЕМКНММЪѕЗжРрМАгІгУСьгђ
в§бд
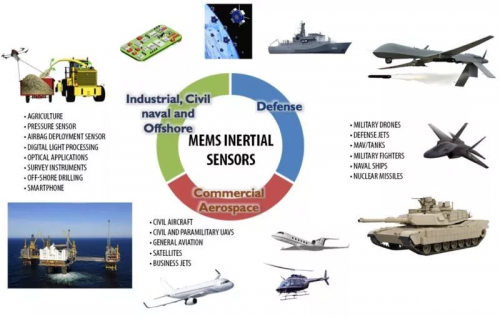
ЛњЦїШЫЁЂЮоШЫЛњЁЂЮоШЫГЕЁЂЮоШЫДЌЕШДњБэадЮоШЫЯЕЭГЕФжЧФмзджїПижЦЪЧЕБЧАздЖЏПижЦСьгђЕФбаОПШШЕуЃЌИќЪЧЬсЩ§ЮоШЫЯЕЭГзджїадКЭжЧФмЛЏЫЎЦНЕФКЫаФММЪѕЁЃзджїЕМКНММЪѕРћгУЖдгІЕФзджїЕМКНЯЕЭГЛёШЁЮоШЫЯЕЭГздЩэЕФЮЛжУЁЂЫйЖШМАзЫЬЌаХЯЂЃЌЪЧЪЕЯжЮоШЫЯЕЭГжЧФмзджїПижЦБиВЛПЩЩйЕФММЪѕБЃеЯЁЃдкЮоЯпЕчЕМКНЁЂЕиаЮЦЅХфЕМКНЁЂЙпадЕМКНЁЂЮРаЧЕМКНЁЂДХЕМКНМАЪгОѕЕМКНЕШжкЖрЕМКНММЪѕжаЃЌВЛашвЊвРРЕЭтНчаХЯЂЕФЙпадЕМКНММЪѕЪЧФПЧАЪЕЯжЮоШЫЯЕЭГзджїЕМКНЕФвЛжжНЯЧПгаСІММЪѕЪжЖЮЁЃ
ЛљгкЮЂЛњЕчЯЕЭГЃЈmicro-electro-mechanical system, МђГЦMEMSЃЉЙпадДЋИаЦїЕФMEMSЙпадЕМКНММЪѕЪЧЙпадЕМКНММЪѕЕФвЛИіживЊЗжжЇЃЌЦфЯЕЭГОпгаГЩБОЕЭЁЂЬхЛ§аЁЁЂЙІКФЕЭвдМАПЙГхЛїЧПЕШгХЕуЁЃвђДЫЃЌеыЖдMEMSЙпадДЋИаЦїМАЦфЕМКНММЪѕЕФбаОПЖдЮоШЫЯЕЭГзджїЕМКНММЪѕЕФПьЫйЗЂеЙКЭТњзуЦфШевцЬсЩ§ЕФгІгУашЧѓгаживЊЕФжЇГХвтвхЁЃ

1. MEMSЙпадДЋИаЦї
1.1 MEMSЙпадДЋИаЦїЕФЗжРр
MEMSЙпадДЋИаЦїАќРЈMEMSЭгТнвЧМАMEMSМгЫйЖШМЦЃЌЦфЗжРргаЖржжЗНЪНЃЌИљОнОЋЖШгЩЕЭЕНИпЦфПЩЗжЮЊЯћЗбМЖЃЈСуЦЋ>100°/hЃЉКЭеНЪѕМЖЃЈСуЦЋ0.1°/h ~ 10°/hЃЉЁЃ
ИљОнИажЊНЧЫйЖШЕФЗНЪНЃЌMEMSЭгТнвЧПЩвдЗжЮЊеёЖЏБлЪНЁЂеёЖЏХЬЪНКЭЛЗаЮаГеёЪНЁЃеёЖЏБлЪНMEMSЭгТнвЧЭЈЙ§ВтСПХЄзЊеёЖЏЗљЖШвдМАХЄзЊеёЖЏЯрЮЛРДЛёШЁНЧЫйЖШЃЌЕфаЭДњБэЮЊENV-05AЯЕСавєВцЪНЭгТнЁЃеёЖЏХЬЪНMEMSЭгТнЭЈЙ§ВтСПдЊМўгыЕзВПжЎМфЕчШнСПЕФБфЛЏРДЛёШЁНЧЫйЖШЃЌЕфаЭДњБэЮЊЛєФсЮЄЖћЙЋЫОЕФHG1940ЙпадВтСПЕЅдЊЁЃЛЗаЮаГеёMEMSЭгТнвЧЭЈЙ§ВтСПДХГЁБфЛЏРДЛёШЁНЧЫйЖШЃЌЕфаЭДњБэЪЧSiIMU02ЭгТнвЧЁЃ
ИљОнИажЊМгЫйЖШЕФЗНЪНЃЌMEMSМгЫйЖШМЦПЩЗжЮЊЮЛвЦЪНЁЂаГеёЪНКЭОВЕчаќИЁЪНЁЃЮЛвЦЪНMEMSМгЫйЖШМЦЭЈЙ§МьВтЕчШнБфЛЏРДВтСПМгЫйЖШДѓаЁЃЌЕфаЭДњБэЮЊNorthrop GrummanЙЋЫОЕФSiACTMЁЃаГеёЪНMEMSМгЫйЖШМЦЭЈЙ§ВтСПаГеёЦЕТЪЕФБфЛЏРДВтСПМгЫйЖШДѓаЁЃЌОЋЖШКмИпЃЌЕфаЭДњБэЪЧЛєФсЮЄЖћЙЋЫОЕФSiMMAЁЃОВЕчаќИЁЪНMEMSМгЫйЖШМЦЭЈЙ§ВтСПЕчШнРДЛёШЁаќИЁзДЬЌЯТЕФдВХЬЛђдВЧђЮЛжУДгЖјВтСПМгЫйЖШДѓаЁЃЌРэТлОЋЖШИпЃЌЕфаЭДњБэЪЧЗЈЙњONERAЙЋЫОЕФSuperSTARМгЫйЖШМЦЁЃ
ИљОнДЋИадРэЃЌMEMSМгЫйЖШМЦПЩЗжЮЊбЙзшЪНЁЂбЙЕчЪНКЭЕчШнЪН3РрЁЃбЙзшЪНМгЫйЖШМЦЭЈЙ§НЋЯргІаќБлСКЩЯЕФЕчзшзЊЛЏГЩЕчбЙЪфГіЃЌМДПЩНЋМгЫйЖШаХЯЂзЊБфЮЊЕчаХКХЪфГіЃЌОпгаЬхЛ§аЁЁЂМгЙЄЙЄвеМђЕЅЁЂОЋЖШИпЁЂЯьгІЫйЖШПьЁЂПЙЕчДХИЩШХЧПЕШгХЕуЁЃбЙЕчЪНMEMSМгЫйЖШМЦЭЈЙ§ВтСПФкВПбЙУєзшжЕБфЛЏгыБЛВтМгЫйЖШЕФЙиЯЕЃЌДгЖјЭЦЫуГіЭтНчМгЫйЖШЃЌОпгаВтСПЗЖЮЇДѓЁЂжиСПаЁЁЂЬхЛ§аЁЁЂПЙИЩШХФмСІЧПЁЂНсЙЙМђЕЅКЭВтСПОЋЖШИпЕФгХЕуЁЃЕчШнЪНMEMSМгЫйЖШМЦЭЈЙ§МьВтЕчШнжЕЕФБфЛЏСПЃЌДгЖјЭЦЫуГіЭтНчМгЫйЖШЃЌОпгаВтСПОЋЖШИпЁЂСщУєЖШИпЁЂЮШЖЈадКУЁЂЙІКФЕЭЕШгХЕуЁЃ
1.2 MEMSЙпадДЋИаЦїЕФЗЂеЙИХПі
ДгMEMSЭгТнвЧгыМгЫйЖШМЦбажЦГЩЙІжСНёЃЌАщЫцзХMEMSММЪѕЕФЗЂеЙЃЌMEMSЭгТнвЧгыМгЫйЖШМЦЦїМўадФмЕУЕНУїЯдЕФЬсИпЁЃ
1.2.1 ЙњЭтMEMSЭгТнвЧЗЂеЙРњГЬ
1954ФъЃЌC.SЪЗУмЫЙЗЂЯжСЫбЙзшаЇгІЃЌЮЊЮЂаЭбЙСІДЋИаЦїЕФбажЦЬсЙЉРэТлЛљДЁЁЃ1967ФъЃЌБэУцЮўЩќВуЙЄвеММЪѕБЛЬсГі,ВЂдкДЫЛљДЁЩЯОпгаИпаГеёЦЕТЪЕФаќСКММЪѕБЛбажЦГіЁЃ1989ФъЃЌУРЙњDraperЪЕбщЪвбажЦГіЕквЛЬЈеёЖЏЪНЮЂЛњЕчЭгТнвЧЃЌетЪЧЙпадММЪѕСьгђЕФвЛДѓБфИяЃЛ1993ФъЃЌИУЪЕбщЪвбажЦГівЛжжвєВцЯпеёЖЏЪНЮЂЛњЕчЭгТнвЧЃЌНЋЭгТнвЧЕФЗЂеЙЯђЧАТѕГівЛДѓВНЁЃ1997ФъЃЌдкУРЙњМгжнДѓбЇВЎПЫРћЗжаЃЃЌЪзИіБэУцЮЂЛњаЕЕФZжсЭгТнвЧБЛЩшМЦГіЃЌЦфЗжБцТЪЮЊ1°/sЁЃ1999ФъЃЌКсБѕММЪѕжааФЬсГівЛжжВЩгУНтёюЩшМЦЕФMEMSЭгТнвЧЃЌЦфЗжБцТЪПЩДя1°/hЁЃ2001ФъЃЌУРЙњDraperЪЕбщЪвЩшМЦГівЛжжЕЅОЇЙшвєВцЪНMEMSЭгТнвЧЃЌЮТЖШЦЏвЦЮЊ1°/ЃЈh/ЁцЃЉЁЃ2002ФъЃЌУРЙњADIЙЋЫОбажЦГіЪРНчЩЯЕквЛПюЕЅЦЌМЏГЩЕФЩЬгУЭгТнвЧADXRSЁЃ2004ФъЃЌЕТЙњЕФHSGЙЋЫОЩшМЦГівЛПюБэУцЮЂЛњаЕЕФXжсЭгТнвЧЃЌСщУєЖШЮЊ8mV/ЃЈ°/sЃЉЁЃ2006ФъЃЌШеБОБјПтДѓбЇЕФK. MaenskaБЈЕРСЫвЛжжНігЩвЛИіДјЕчМЋЕФяЏюбЫсЧІРтжљЬхЙЙГЩЕФаТаЭЕФбЙЕчеёЖЏЙЬЬЌЮЂЛњаЕЭгТнЁЃ2013ФъЃЌЗЈЙњЕчзггыаХЯЂММЪѕЪЕбщЪвЩшМЦГівЛжжВЩгУСЫКсЯђаќЙвЩшМЦЕФ3DЕчШнвєВцЭгТнЁЃ
1.2.2 ЙњЭтMEMSМгЫйЖШМЦЗЂеЙРњГЬ
20ЪРМЭ60ФъДњФЉЃЌЖдMEMSМгЫйЖШМЦЕФбаОПКЭПЊЗЂЙЄзїПЊЪМЦєЖЏЃЌжївЊбаЗЂЕЅЮЛЮЊУРЙњЕФDraperЪЕбщЪвЁЂЫЙЬЙИЃДѓбЇвдМАМгжнДѓбЇВЎПЫРћЗжаЃЁЃ20ЪРМЭ70ФъДњЃЌзлКЯMEMSЙЄвегыбЙзшаЇгІЃЌГіЯжСЫбЙзшЪНМгЫйЖШМЦЃЌЪЕЯжСЫMEMSМгЫйЖШМЦЕФЩЬвЕЛЏЁЃ20ЪРМЭ80ФъДњФЉЦкЃЌЫцзХБэУцMEMSЙЄвегыДЋИаММЪѕЕФНсКЯЃЌЕчШнЪНMEMSМгЫйЖШМЦЕУЕНбИЫйЗЂеЙЃЌВЂдкЦћГЕаавЕЕУЕНгІгУЁЃ1989ФъЃЌУРЙњЕФADIЙЋЫОбажЦГівЛПюADXL50МгЫйЖШМЦЃЌИУМгЫйЖШМЦга50gСПГЬЁЃзд21ЪРМЭвдРДЃЌЫцзХМЏГЩЕчТЗМАМЦЫуЛњаавЕЕФбИЫйЗЂеЙЃЌMEMSМгЫйЖШМЦИќЖргІгУгкЦћГЕАВШЋЦјФвЃЌЖјЧвдкЪжЛњЁЂМЦЫуЛњЕШЕчзгЯћЗбВњвЕжаЗЂЛгдНРДдНживЊЕФзїгУЁЃЮДРДMEMSМгЫйЖШМЦНЋЯђзХЧсСПЛЏЁЂИпОЋЖШЁЂОМУЛЏЕФЗНЯђЗЂеЙЁЃ
1.2.3 ЙњФкMEMSЙпадЦїМўЗЂеЙРњГЬ
ЮвЙњЕФMEMSЙпадЦїМўЕФбаОПЦ№ВНгк20ЪРМЭ90ФъДњКѓЦкЃЌзд1995ФъЦ№ЕУЕНПЦММВПЁЂНЬг§ВПЁЂЙњМвздШЛПЦбЇЛљН№ЮЏдБЛсЕШДѓСІжЇГжЃЌЙњФкЕФMEMSЭгТнвЧбажЦШЁЕУСЫЯджјГЩЙћЁЃ1998ФъЧхЛЊДѓбЇбажЦГіШЋЙњЕквЛИівєВцЪНMEMSЭгТнвЧЃЌЦфЗжБцТЪЮЊ3°/sЁЃ2006ФъЃЌЕчзгМЏЭХ49ЫљгыЖэТоЫЙгІгУЮяРэбаОПЫљКЯзїбажЦГіЗжБцТЪЮЊ70°/hЕФЭгТнЁЃ2010ФъЃЌжаЙњПЦбЇдКДЋИаЦїММЪѕЙњМвжиЕуЪЕбщЪвБЈЕРСЫвЛжжВЩгУИпЖдГЦНсЙЙЕФЮЂЛњаЕеёЖЏЛЗаЭЭгТнЁЃ2012ФъЃЌЬЈЭхДѓбЇЕФChun-Wei TsaiЕШжЦзїСЫОпгаПэЧ§ЖЏЦЕТЪЕФЫЋНтёюЮЂЛњаЕЭгТнЁЃОЙ§20ЖрФъЕФЗЂеЙЃЌЮвЙњЯжгаЕФММЪѕвбОаЮГЩДгЩшМЦЕНЩњВњЁЂВтЪдЕФвЛЯЕСаЬхЯЕЃЌЙњФкжкЖрMEMSЙпадЦїМўЙЋЫОЕФЦїМўОЋЖШвВгаСЫЯджјЬсИпЁЃ
2. MEMSЙпадЕМКНЕФЙиМќММЪѕ
MEMSЙпадЕМКНЯЕЭГШэМўЩшМЦЗНУцжївЊЪЧЕМКНЫуЗЈЃЌАќРЈГѕЪМЖдзМЁЂЙпадНтЫуМАЮѓВюВЙГЅЕШЫуЗЈЃЛЦфгВМўЩшМЦЗНУцжївЊАќРЈЕчТЗМАНсЙЙЕФЩшМЦЁЂЙпадЕМКНДЋИаЦїЃЈЭгТнвЧЁЂМгЫйЖШМЦЃЉМАЕМКНМЦЫуЛњЕФбЁдёЕШЁЃЯЕЭГОЋЖШВЛНігыгВМўЯрЙиЃЌЖјЧвгыШэМўгаКмДѓЙиЯЕЁЃдкФПЧАгВМўМгЙЄММЪѕЗЂеЙНЯТ§ЕФЧАЬсЯТЃЌЯЕЭГжаЮѓВюВЙГЅЫуЗЈгШЮЊживЊЁЃЖдгкЕМКНОЋЖШвЊЧѓНЯИпЕФгІгУЃЌгЩгкЯЕЭГОпгаГЄКНЪБЕФЬиЕуЃЌMEMSЙпадЕМКНЮѓВювзЗЂЩЂЃЌЖрВЩгУзщКЯЕМКНЕФЗНЪНРДвжжЦЙпадЕМКНЯЕЭГЕФЮѓВюЗЂЩЂЁЃБОНкжївЊНщЩмMEMSЙпадДЋИаЦїЕФЮѓВюЗжЮігыВЙГЅвдМАMEMSзщКЯЕМКНЫуЗЈЩшМЦЁЃ
2.1 MEMSЙпадДЋИаЦїЕФЮѓВюЗжЮігыВЙГЅ
ЙпадДЋИаЦїЪЧЙпадЕМКНЯЕЭГЕФКЫаФзщГЩЃЌЦфОЋЖШОіЖЈСЫЙпадЕМКНЯЕЭГЕФОЋЖШЃЌЫљвдЙпадЕМКНЯЕЭГЕФвЛЯюжївЊЙЄзїОЭЪЧНЋЙпадДЋИаЦїЮѓВюНјааВЙГЅЁЃЬсИпЙпадЕМКНЯЕЭГОЋЖШЕФЪжЖЮДѓжТгавдЯТСНжжЃЌЕквЛжжЪЧДгЙЄвеЩЯЬсИпЙпадДЋИаЦїЕФОЋЖШЃЌЕЋЪЧДЫЗНЗЈММЪѕФбЖШДѓЃЌЧвЖдгкМгЙЄЬѕМўЁЂВФСЯЕШвЊЧѓИпЃЛЕкЖўжжОЭЪЧВЩгУЮѓВюВЙГЅЗНЪНРДЖдгкЯЕЭГЕФЮѓВюНјааВЙГЅЁЃ
MEMSЙпадДЋИаЦїЕФЮѓВюЗжЮігыВЙГЅЗНЗЈДѓжТЗжЮЊ3жжЃКЕквЛжжЪЧВЩгУЮѓВюВЙГЅЫуЗЈЕФЗНЪННјааВЙГЅЃЌМДНЋЮѓВюЭЈЙ§ЫуЗЈФтКЯЗНЪННјааВЙГЅЃЛЕкЖўжжЪЧВЩгУа§зЊЕїжЦММЪѕЃЌНЋIMUЃЈЙпадВтСПЕЅдЊЃЉМгЩЯзЊЖЏЛњЙЙНјааа§зЊЃЌЭЈЙ§а§зЊРДߞçÁжЕЮѓВюЃЈГЦЮЊа§зЊЕїжЦЃЉЃЛЕкШ§жжЪЧВЩгУAllanЗНВюЗжЮіЗЈЃЌвдВЙГЅЯЕЭГЕФЫцЛњЮѓВюЁЃ
2.1.1 ЙпадДЋИаЦїЕФЮТЖШЮѓВюВЙГЅММЪѕ
ЮТЖШЫљДјРДЕФЙпадЦїМўОЋЖШЮѓВюжївЊРДздЙпадЦїМўБОЩэЖдгкЮТЖШЕФУєИаГЬЖШвдМАЮТЖШЬнЖШЛђепЮТЖШгыЮТЖШЬнЖШЕФНЛВцГЫЛ§ЯюЕФгАЯьЁЃЫцзХЮТЖШЕФБфЛЏЃЌЙпадЦїМўЕФНсЙЙВФСЯгЩгкШШеЭРфЫѕЛсаЮГЩИЩШХСІОиЃЌвђДЫашвЊЖдгкЙпадЦїМўЕФЮТЖШЬиадНјаабаОПЃЌвдЛёШЁЮТЖШЖдгкЙпадЦїМўЪфГіадФмгАЯьЕФЙцТЩЃЌНЈСЂМгЫйЖШМЦОВЬЌЮТЖШФЃаЭВЂЧвЖдвђЮТЖШБфЛЏв§Ц№ЕФЮѓВюНјааВЙГЅЃЌЪЧЬсИпЦфОЋЖШЕФвЛжжгааЇЪжЖЮЁЃ
ЖдЭгТнвЧМАМгЫйЖШМЦЕФОВЬЌЮТЖШФЃаЭНјааФтКЯЕФЗНЗЈвЛАуВЩШЁНЯаЁЖўГЫЗЈЃЌвдДЫЕУЕНЭгТнвЧКЭМгЫйЖШМЦЕФЪ§бЇФЃаЭЯЕЪ§гыЮТЖШЕФЙиЯЕВЂНЈСЂОВЬЌЮТЖШЮѓВюВЙГЅФЃаЭЃЌДгЖјЬсИпЦїМўОЋЖШЁЃЙњФкЖрМвЭгТнвЧМАМгЫйЖШМЦЩњВњЕЅЮЛОљЖдЮТЖШЮѓВюВЙГЅНјаабаОПЃЌЪЙжЎНЯВЙГЅЧАЕФВњЦЗОВЬЌЮѓВюМѕаЁСЫвЛИіЪ§СПМЖЁЃ
2.1.2 ЙпадДЋИаЦїГЃжЕЦЏвЦЮѓВюЕФа§зЊЕїжЦММЪѕ
а§зЊЕїжЦММЪѕЦ№ГѕгІгУгкОВЕчЭгТнЯЕЭГЃЌЭЈЙ§ПЧЬха§зЊРДздЖЏВЙГЅЦЏвЦЮѓВюСІОиЁЃздМЄЙтЭгТнУцЪРвдРДЃЌУРЙњбИЫйПЊеЙСЫа§зЊЪНЙпадЕМКНЯЕЭГЕФбаОПЃЌ1968ФъЃЌгабЇепЪзДЮЬсГіЭЈЙ§а§зЊIMUЕФЗНЪНРДЖдЙпадДЋИаЦїЕФЦЏвЦЮѓВюНјааВЙГЅЁЃ20ЪРМЭ70ФъДњЃЌТоПЫЮЄЖћЙЋЫОбажЦСЫОВЕчЭгТнМьВтЦїЃЌПЧЬхВЩгУСЫа§зЊММЪѕЃЌЪЙЕУгыЦфХфЬзЕФНЂДЌЯЕЭГОпБИГЄЪБМфЕФОЋЖШадФмЁЃ20ЪРМЭ80ФъДњЃЌSperryЙЋЫОбажЦСЫЕЅжса§зЊЙпадЕМКНЯЕЭГЃЌВЩгУСЫОЕфЕФЕЅжсЫФЮЛжУе§ЗДзЊЭЃЗНАИЃЌжБЕНЯждкИУЗНАИШдБЛЙуЗКгІгУЁЃ1989ФъЃЌББдМДЌгУБъзМЙпадЕМКНЯЕЭГМДMK49аЭЫЋжса§зЊЪНМЄЙтЭгТнЙпадЕМКНЯЕЭГЃЌдкЧБЭЇвдМАЫЎУцНЂЭЇЩЯНјаазАБИЁЃдкЙњФкЙњЗРПЦММДѓбЇЪзЯШПЊЪМа§зЊЕїжЦММЪѕдкЙтбЇЭгТнЩЯЕФгІгУЁЃШчНёа§зЊЕїжЦММЪѕдкMEMSЩЯжївЊВЩгУЕЅжса§зЊЗНАИЃЌЫЋжса§зЊЗНАИгЩгка§зЊЛњЙЙИДдгЕШдвђЯрЖдгІгУНЯЩйЁЃ
гЩгка§зЊЕФашвЊЃЌЕМКНЯЕЭГВЩШЁНнСЊЫуЗЈЃЌДгдРэЩЯРДНВЃЌMEMSЙпадЕМКНЯЕЭГа§зЊЕїжЦПЩвдгааЇЕжЯћЯЕЭГГЃжЕЮѓВюЃЌЯЕЭГЕФЮѓВюДЋВЅЗНГЬШчЯТЃК
дкЪНЃЈ1ЃЉжаЃЌгЩгкЭгТнвЧвдМАМгЫйЖШМЦздЩэВтСПЮѓВюЫљДјРДЕФЯЕЭГЮѓВюЮЊσωbibКЭσfbЃЌвђДЫЪНжаЕФCnbσωbibвдМАCnbσfbСНЯюЮѓВюЪЧгЩгкВтСПЮѓВюв§ШыЕФЃЌЙЪЮѓВюВЙГЅжївЊВЙГЅетСНЯюЮѓВюЁЃгЩгквдЩЯСНЯюОљАќКЌCnbЃЌжмЦкадЕиИФБфCnbжЕМДПЩЯћГ§етСНЯюЮѓВюЃЌЙЪдкЙпадЕМКНЯЕЭГЩЯЪЉМга§зЊзАжУЃЌНЋжмЦкадЮѓВюЭЈЙ§а§зЊЕжЯћЃЌетОЭЪЧа§зЊЕїжЦММЪѕЬсИпЙпадЕМКНЯЕЭГОЋЖШЕФдРэЁЃ
а§зЊЕїжЦЗНАИашвЊШЗЖЈа§зЊжсИіЪ§ЃЈЕЅжсЁЂЫЋжсЛђЖржсЃЉЁЂа§зЊЫйТЪЁЂа§зЊНЧМгЫйЖШЁЂзЊЭЃЪБМфМАЭЃжЙЮЛжУЪ§ЕШВЮЪ§ЁЃОВЛљзљМАЖЏЛљзљЯТзЊЭЃЗНАИЕФВЛЭЌЛсЖда§зЊЕїжЦаЇЙћВњЩњгАЯьЁЃ
2.1.3 ЙпадДЋИаЦїЫцЛњЮѓВюЕФAllanЗНВюЗжЮі
ФПЧАГЃгУЕФЫцЛњЮѓВюНЈФЃЗНЗЈгаЪБМфађСаЗжЮіЗЈЁЂAllanЗНВюЗЈМАЙІТЪЦзУмЖШЗжЮіЗЈЁЃ
гЩгкЙпадЕМКНЕФЮѓВюЗНГЬЭЦЕМЖМЪЧНЈСЂдкЮѓВюЮЊАздыЩљЕФЛљДЁЩЯЃЌЖјдкЯжЪЕжаЃЌMEMSЙпадЦїМўЕФЪфГіЪ§ОнАќКЌЕФИїжждыЩљЖМЛсЖдЯЕЭГВњЩњИЩШХЃЌЕМжТМЦЫуНсЙћжаГіЯжЫцЛњЮѓВюЁЃЭгТнЪфГіжЕЕФЮѓВюжаЕФЫцЛњдыЩљашвЊНЈФЃРДВЙГЅЃЌЖјAllanЗНВюЗжЮіЗЈдђЪЧФПЧАЫцЛњдыЩљЗжЮіжагІгУНЯЦеБщЁЂНЯЙуЗКЕФЗНЗЈжЎвЛЁЃMEMSЦїМўжаЫцЛњЮѓВюжївЊЗжЮЊНЧЖШЫцЛњгЮзпЁЂМгЫйЖШЫцЛњгЮзпЁЂСПЛЏдыЩљМАСуЦЋЮШЖЈадЕШЁЃ
AllanЗЈЪЧдк1966ФъDavidAllanЬсГіЕФЃЌЦфжївЊЪЧгУгкЗжЮіеёЕДЦїЯрЮЛвдМАЦРЙРЦЕТЪЮШЖЈадЁЃAllanЗНВюПЩвдЗДгГГіСНИіСЌајВЩбљЧјМфФкЦНОљЦЕТЪВюЕФЦ№ЗќзДПіЃЌЛљгкЯрЮЛЪ§ОнКЭЦЕТЪЪ§ОнЕФАЂТзЗНВюЙРМЦЪНЮЊЃК
2.2 MEMSзщКЯЕМКНЫуЗЈ
MEMSЙпадЕМКНЯЕЭГОпгаЕЭГЩБОЁЂЬхЛ§аЁЁЂЙІКФЕЭЕШгХЪЦЁЃЕЋЪЧгЩгкMEMSЙпадЦїМўОЋЖШНЯЕЭЃЌГЄЪБМфЪЙгУЛсЕМжТЮѓВюЗЂЩЂНЯПьЃЌВЛФмЕЃШЮГЄЪБМфЕФЕМКНШЮЮёЃЌЫљвдФПЧАвЛАуВЩгУЖрДЋИаЦїШкКЯЕФЗНЪНРДНјааЕМКНЃЌМДНЋMEMSЙпадЕМКНгыЦфЫћЕМКНЗНЪННјааШкКЯЃЌЭЈЙ§ЦфЫћЕМКНЯЕЭГЕФЕМКНаХЯЂИЈжњРДаое§ЙпадЕМКНЯЕЭГЕФЮѓВюЃЌгЩДЫРДЬсИпећИіЕМКНЯЕЭГЕФОЋЖШЁЃШєвЊНјааЖрИіЕМКНЯЕЭГЕФЪ§ОнШкКЯЃЌдђвЊЪЙгУТЫВЈЕШЗНЗЈЁЃ
2.2.1 ПЈЖћТќТЫВЈЫуЗЈ
ПЈЖћТќЃЈKalmanЃЉТЫВЈЪЧвЛжжЭЈЙ§дкБЛЬсШЁЕФЙлВтаХКХжаЛёЕУаХЯЂРДЖдзДЬЌСПНјааЙРМЦЕФТЫВЈЫуЗЈЁЃKalmanТЫВЈЪЧвЛжжЪЕЪБЕнЭЦЫуЗЈЃЌДІРэЖдЯѓЪЧЫцЛњЖдЯѓЃЌИљОнЯЕЭГдыЩљгыЙлВтдыЩљЃЌНЋЯЕЭГЕФЙлВтжЕЕФЪфГізїЮЊТЫВЈЦїЪфШыЃЌНЋашвЊЙРМЦЕФзДЬЌСПзїЮЊЪфГіЃЌМДЭЈЙ§ЩЯвЛЪБПЬЕФЙлВтжЕЙРМЦГіЯТвЛЪБПЬЕФЯЕЭГзДЬЌСПЃЌЙЪЦфЪЕжЪЩЯЪЧвЛжжЙРМЦЗНЗЈЁЃ
ГЃЙцЕФKalmanТЫВЈЪЪгУгкЯпадИпЫЙФЃаЭЃЌЖјДѓЖрЪ§ЙпадЕМКНЯЕЭГОљЮЊЗЧЯпадЯЕЭГЃЌЙЪГЃЙцЕФKalmanТЫВЈВЛФмТњзувЊЧѓЃЌБиаыНЈСЂЪЪгУгкЗЧЯпадЯЕЭГЕФТЫВЈЫуЗЈЁЃвђДЫЗЂеЙГіРЉеЙKalmanТЫВЈЗНЗЈЃЌЦфНЋЗЧЯпадЯЕЭГЕФЗЧЯпадКЏЪ§ЭЈЙ§ЬЉРеМЖЪ§ЕШЗНЗЈЯпадЛЏЃЌВЂЪЁШЅИпНзЯюЃЌЕУЕНЯпадЯЕЭГФЃаЭЁЃ
гЩгкРЉеЙKalmanТЫВЈЪЧНЋЗЧЯпадКЏЪ§НјааЯпадЛЏЃЌвђДЫВЛПЩБмУтЕФДјРДЯпадЛЏЮѓВюЃЌгЩДЫЗЂеЙГіЮоМЃKalmanТЫВЈЁЃИУТЫВЈЗЈеыЖдЗЧЯпадКЏЪ§ЃЌЖдЦфИХТЪУмЖШНјааНќЫЦЃЌЪЙгУвбОШЗЖЈЕФбљБОРДЙРМЦзДЬЌЕФКѓбщИХТЪУмЖШЃЌВЛашвЊЖдЗЧЯпадКЏЪ§НјааНќЫЦЁЃЯрБШгкРЉеЙПЈЖћТќТЫВЈЖјбдЃЌЮоМЃKalmanТЫВЈЕФЭГМЦСПВЛНіОпгаИќИпЕФОЋЖШЃЌЖјЧвОпгаИќИпЕФЮШЖЈадЁЃ
2.2.2 ЛЅВЙТЫВЈЫуЗЈ
ДЋЭГЕФРЉеЙKalmanТЫВЈОпгабХПЩБШОиеѓЃЌДцдкМЦЫуСПДѓЁЂВЂЧвАздыЩљЬѕМўВЛФмБЃжЄЪБПЬГЩСЂЕШШБЕуЃЛЕЋЪЧВЩгУЛЅВЙТЫВЈЫуЗЈПЩвдМѕаЁМЦЫуСПЃЌЬсИпЯЕЭГВтСПОЋЖШЃЌВЂЧвВЛашвЊдкАздыЩљЬѕМўЯТвВПЩГЩСЂЁЃРћгУЭгТнвЧгыМгЫйЖШМЦдкЦЕгђЩЯЕФЛЅВЙЬиадПЩвдНЋЭгТнвЧгыМгЫйЖШМЦЕФЪ§ОнШкКЯОЋЖШЬсИпЃЌЪЕЯжИпОЋЖШЕФШкКЯЁЃ
2.2.3 ЩёОЭјТч
ЛњЦїЩёОЭјТчЪЧвдЩњЮяЩёОЭјТчЮЊдаЭЁЃЩёОЭјТчЪЧЛњЦїбЇЯАЕФвЛжжЃЌЭЈЙ§ЭјТчЯЕЭГРДбЕСЗФЃаЭВЮЪ§ЃЌЩёОЭјТчжївЊгЩЪфШыВуЁЂЪфГіВуМАвўКЌВуЙЙГЩЁЃДг20ЪРМЭ40ФъДњЕФM-PЩёОдЊКЭHebbбЇЯАЙцдђЃЌЕН50ФъДњЕФHodykin-HuxleyЗНГЬЁЂИажЊЦїФЃаЭгыздЪЪгІТЫВЈЦїЃЌдйЕН60ФъДњЕФздзщжЏгГЩфЭјТчЁЂЩёОШЯжЊЛњЁЂздЪЪгІЙВеёЭјТчЃЌжкЖрЩёОЭјТчМЦЫуФЃаЭвбЗЂеЙГЩЮЊМЦЫуЛњЪгОѕЁЂаХКХДІРэЕШСьгђЕФОЕфЗНЗЈЃЌДјРДСЫЩюдЖЕФгАЯьЁЃ
ЩёОЭјТчгае§ЯђЩёОЭјТчМАЗДЯђЩёОЭјТчСНжжЁЃЩёОЭјТчОпгаВЂааДІРэЁЂЗжВМЪНДцДЂЁЂИпШпгрЖШЁЂПЩвдНјааЗЧЯпаддЫЫувдМАСМКУЕФШнДэадЕШЬиЕуЁЃЫцзХЩёОЭјТчММЪѕЕФЗЂеЙЃЌЦфгІгУСьгђвВдкВЛЖЯЭиПэЃЌШчНёдкЙпадЕМКНЁЂЭМЯёДІРэЕШСьгђЗЂЛгзХжСЙиживЊЕФзїгУЁЃЩёОЭјТчЫуЗЈОпгаЙуЗКЕФРэТлЛљДЁЃЌЦфжаАќРЈЩёОЭјТчНсЙЙФЃаЭЁЂЭјТчЭЈаХФЃаЭЁЂМЧвфФЃаЭЁЃбЇЯАЫуЗЈБэУїЃЌЛљгкЩёОЭјТчЫуЗЈЕФДѓЪ§ОнЗжЮіОпгаСМКУЕФадФмКЭгІгУЧАОАЃЌдкДЋИаЦїЕФЪ§ОнШкКЯжаЬсЙЉСЫОіВпвРОнЃЌЮЊЮоШЫЯЕЭГЕФзджїЕМКНзїГіживЊЕФЙБЯзЁЃФЃК§ЩёОЭјТчдкЪ§ОнШкКЯЁЂЪ§ОнЭкОђжаадФмгХдНЃЌПЩвдНЯКУРћгУгябдЃЌЧвжЊЪЖБэДяаЮЪНвзгкРэНтЃЌЕЋДцдкздбЇЯАФмСІШѕЁЂФбРћгУЪ§жЕаХЯЂЕШШБЕуЃЌЙЪПЩНЋШЫЙЄЩёОЭјТчгыФЃК§ЯЕЭГНјааНсКЯЁЃ
3. MEMSЙпадЕМКНЕФгІгУ
MEMSЙпадЕМКНММЪѕвдЦфЬхЛ§аЁЁЂЙІКФЕЭЁЂжиСПЧсМАЕЭГЩБОЕШЬиЕудкЖржжЮоШЫЯЕЭГЃЌШчЮоШЫЛњЁЂЮоШЫГЕЁЂЮоШЫДЌМАЛњЦїШЫЕШЯЕЭГжаЕУЕНЦеБщгІгУЁЃ
3.1 ЮоШЫЛњСьгђ
дкНќМИФъРДЃЌЮЂаЁаЭЮоШЫЛњдкОќгУвдМАУёгУСьгђФкЗЂЛгзХдНРДдНживЊЕФзїгУЃЌЖјЮЊСЫЪЕЯжЮоШЫЛњздЩэЕФЖЈЮЛвдМАЖЈЮЛЮЪЬтЃЌКНзЫВтПиЯЕЭГЗЂЛгзХжСЙиживЊЕФзїгУЁЃКНзЫВтПиЯЕЭГжївЊгЩGPSЬьЯпЁЂGPSНгЪеАхЁЂНнСЊЪНДХДЋИаЦїЁЂЙпадВтСПЕЅдЊЁЂИпЖШПеЫйДЋИаЦївдМАЕїРэЕЅдЊЙЙГЩЁЃДЋИаЦїЕФОЋЖШжБНгОіЖЈЮоШЫЛњЮЛзЫЕФОЋЖШ,ДЋИаЦїВЩМЏЕНЕФЪ§ОнЭЈЙ§ЕМКНЫуЗЈМЦЫуГіЮоШЫЛњЕФЮЛжУзЫЬЌаХЯЂЁЃФПЧАЮоШЫЛњЕФЕМКНжївЊВЩШЁНЋMEMSЙпадЕМКНЯЕЭГгыGPSзщКЯЕФЪжЖЮЃЌетбљМШПЩвдЬсИпЯЕЭГОЋЖШЃЌгжПЩвдЫѕЖЬГѕЪМЖдзМЕФЪБМфЁЃШчНёЮоШЫЛњЩЯУцДюдиЕФЕМКНЯЕЭГОЋЖШЮЊЯћЗбМЖ,ШчInvensense MP6500ЕФОЋЖШЮЊ2°/sЃЌЖјЫцзХMEMSЦїМўОЋЖШЕФЬсИпвдМАГЩБОЕФНЕЕЭЃЌЮДРДЮоШЫЛњЕФЕМКНОЋЖШНЋЬсИпЁЃ
3.2 ЮоШЫГЕСьгђ
ЮоШЫГЕЪЧЭЈЙ§ГЕдиДЋИаЦїРДИажЊЭтНчЛЗОГЃЌВЂЧвЛёШЁГЕСОЮЛжУЁЂзЫЬЌаХЯЂвдМАеЯАЮяаХЯЂЃЌДгЖјПижЦГЕСОааЪЛЫйЖШЁЂзЊЯђвдМАЦ№ЭЃЕШЁЃФПЧАЙШИшЁЂАйЖШЕШЙЋЫООљдкПЊеЙЮоШЫГЕЕФбажЦЙЄзїЃЌВЂвбОПЊеЙЕРТЗЪЕбщЁЃЕБЮоШЫГЕаазпЕНИпДѓНЈжўЮяЯТЃЌЧвGPSБЛекЕВЖјЮоЗЈе§ГЃЙЄзїЪБЃЌЮоШЫГЕЩЯДюдиЕФЙпадЕМКНЯЕЭГЖЬЪБМфФкЕФОЋЖШПЩвдТњзуГЕСОзджїЧАааЕФашЧѓЁЃЮоШЫГЕЩЯЕФMEMSЙпадЕМКНЯЕЭГЃЌвЛАуОЋЖШвЊЧѓНЯИпЁЃ
3.3 ЮоШЫДЌСьгђ
гЩгкБпОГбВТпЁЂЫЎжЪПБЬНЕШШЮЮёЫљВЩШЁЦеЭЈЕФНЂДЌЩшБИНЯЮЊЮЃЯеВЂЧвГЩБОНЯИпЃЌжТЪЙЮоШЫДЌММЪѕЗЂеЙбИЫйЁЃЛёШЁЮоШЫДЌЮЛжУзЫЬЌаХЯЂЪЧЮоШЫДЌФмЙЛзджїПЊеЙЙЄзїЕФживЊЧАЬсЁЃШчНёЮоШЫДЌЩЯХфБИЕФДЋИаЦїжївЊгаGPSЃЌMEMSЙпадЕМКНЯЕЭГМАБмеЯРзДяЕШЁЃЫцзХMEMSЙпадЕМКНЯЕЭГОЋЖШЕФЬсИпЃЌЙпадЕМКНЯЕЭГдкЮоШЫДЌЕФЮЛжУзЫЬЌаХЯЂЛёШЁжаЗЂЛгзХжСЙиживЊЕФзїгУЁЃЮоШЫДЌЩЯДюдиЕФMEMSЙпадЕМКНЯЕЭГЃЌвЛАуЯћЗбМЖЕФжаЕЭОЋЖШМДПЩТњзуашЧѓЁЃ
3.4 ЛњЦїШЫСьгђ
вЦЖЏЛњЦїШЫЪЧвЛжжПЩвдзджїдкЙЬЖЈЛђЪББфЛЗОГжаНјааЙЄзїЕФздЖЏЛЏЩшБИЁЃНќФъРДдкЗўЮёвЕЁЂМвОгЁЂЙЄвЕЕШСьгђгІгУЙуЗКЁЃТжЪНЛњЦїШЫдкгІгУЗНУцгыЮоШЫГЕЯрЫЦЃЌОљЭЈЙ§ЪгОѕЯрЛњЁЂMEMSЙпадДЋИаЦїЁЂМЄЙтРзДяМАРяГЬМЦЕШДЋИаЦїВЩМЏЪ§ОнНјааЕМКНЁЃЙњФкИпаЃШчЙњЗРПЦММДѓбЇЁЂЧхЛЊДѓбЇЁЂЩЯКЃНЛЭЈДѓбЇЁЂЙўЖћБѕЙЄвЕДѓбЇЕШИпаЃОљЖдТжЪНЛњЦїШЫНЯдчПЊЪМбаОПЙЄзїЁЃдкВЩШЁЙпадДЋИаЦїгыРяГЬМЦЕФТжЪНЛњЦїШЫЕФЕМКНЙ§ГЬжаЃЌMEMSЙпадДЋИаЦїЬсЙЉОЋзМЕФзЫЬЌНЧЃЌЖјгЩгкТжзгДђЛЌЕШЖдЙпадЕМКНвдМАРяГЬМЦВњЩњгАЯьЃЌЯжДѓЖрЭЈЙ§ЪгОѕРяГЬМЦгыMEMSЙпадЕМКНзщКЯЕМКНЃЌЭЈЙ§РЉеЙKalmanТЫВЈЫуЗЈРДНјааЪ§ОнШкКЯЃЌДгЖјЬсИпЯЕЭГОЋЖШЁЃ
3.5 ЦфЫћСьгђ
Г§СЫЩЯЪіСьгђЭтЃЌMEMSЙпадДЋИаЦїЛЙдкЕчзгЩшБИЃЌШчЪжЛњЁЂЦНАхЕчФдЁЂгЮЯЗЛњЁЂЯрЛњЁЂVRблОЕвдМАгУгкЪвФкЖЈЮЛЕФЕЅБјЕМКНЁЃФПЧАЯћЗРдБдкИпТЅУ№Л№ЪБвдМАааЖЏВЛБуЕФРЯШЫдкМвЕФШЫЩэАВШЋЮЪЬтЪЧЩчЛсЦеБщЙизЂЕФЮЪЬтЃЌШчЙћНЋMEMSЙпадЕМКНЯЕЭГЗХжУдкЬНВтШЫдБЩэЩЯНјааЕМКНЃЌдђПЩвдЛёЕУЪЕЪБЮЛжУзЫЬЌаХЯЂЃЌетбљОЭПЩвдЬсИпБЛМрЪгШЫдБЕФАВШЋЯЕЪ§ЁЃЪЙгУMEMSЙпадЕМКНЯЕЭГНјааЪвФкШЫдБЖЈЮЛАьЗЈДѓжТгавдЯТМИжжЃКвЛжжЪЧРћгУMEMSМгЫйЖШМЦЖдШЫдБВНЗЅзДЬЌНјааМьВтЪЖБ№ЃЌдйЭЈЙ§ДХСІМЦМьВтШЫдБдЫЖЏЗНЯђЃЌгЩДЫРДНјааЪвФкШЫдБЕФЖЈЯђЖЈЮЛЁЃСэЭтвЛжжЗНЗЈЪЧВЩгУСНИіЛђЖрИіMEMSЙпадЕМКНЯЕЭГЃЌАВзАдкШЫдБНХВПвдМАбќВПЮЛжУЃЌЭЈЙ§ЖрИіMEMSЙпадЕМКНЯЕЭГаое§ЗНЗЈРДНјааЖЈЮЛЁЃ
4. MEMSЙпадЕМКНЕФЗЂеЙеЙЭћ
4.1 MEMSЙпадЕМКНЦїМў
НќМИФъРДЃЌMEMSЙпадДЋИаЦїЗЂеЙбИЫйЃЌОЋЖШВЛЖЯЬсИпЁЃЫфШЛЯрБШЙтЯЫЭгТнЁЂМЄЙтЭгТнШдгаКмДѓВюОрЃЌЕЋЪЧЦфМлИёЕЭЁЂЬхЛ§аЁЁЂжиСПЧсЃЌЪЙMEMSЙпадЕМКНЯЕЭГдкЙпадЕМКНЯЕЭГжаЗЂЛгживЊзїгУЁЃЮДРДЫцзХMEMSВФСЯЙЄвегыжЦдьЙЄвеВЛЖЯЗЂеЙЃЌMEMSЙпадЕМКНЯЕЭГОЋЖШБиНЋВЛЖЯЬсИпЃЌЦфГЩБОвВНЋВЛЖЯНЕЕЭЃЌвђДЫВЩгУеНТдМЖИпОЋЖШMEMSЭгТнвЧШЁДњЙтЯЫЭгТнвЧЪЧвЛИіживЊЗЂеЙЧїЪЦЁЃЫцзХЮЂМгЙЄЙЄвеЕФВЛЖЯНјВНЃЌMEMSЙпадДЋИаЦїНЋЯђзХЧсжЪЁЂаЁаЭЛЏЗНЯђЗЂеЙЁЃ
4.2 MEMSзщКЯЕМКНЫуЗЈ
ОЁЙмMEMSЙпадДЋИаЦїОЋЖШдкВЛЖЯНјВНЃЌЕЋЪЧеНЪѕМЖMEMSЙпадЕМКНЯЕЭГЮѓВюЫцЪБМфЛ§РлШдШЛЗЂЩЂНЯДѓЃЌдкКмЖрГЁКЯЛЙВЛФмТњзуИпОЋЖШЕФвЊЧѓЃЌЙЪMEMSЙпадЕМКНгыGPSзщКЯЕМКНШдШЛЪЧжївЊЕМКНЗНЪНЁЃвђДЫЃЌбаОПОЋЖШвдМАаЇТЪИќИпЁЂТГАєадИќЧПЕФЫуЗЈЃЌдкШэМўЗНУцИјгшзщКЯЕМКНЯЕЭГжЇГжвВЪЧживЊЕФЗЂеЙЗНЯђЁЃ
4.3 MEMSЙпадЕМКНЕФгІгУ
дкMEMSММЪѕЗЂеЙЕФЪ§ЪЎФъФкЃЌMEMSЙпадЕМКНММЪѕдкЕчзгСьгђЁЂЦћГЕаавЕвдМАМвОгЗўЮёаавЕЕУЕНСЫЙуЗКгІгУЁЃЫцзХMEMSЙпадЕМКНОЋЖШКЭЮШЖЈадВЛЖЯЬсИпЃЌЮДРДMEMSЙпадЕМКНММЪѕБиНЋдкЮоШЫЯЕЭГСьгђЃЌШчКНЬьЦїЁЂЮРаЧЁЂЛњЦїШЫЕШЮоШЫЯЕЭГжаЃЌАчбнживЊЕФНЧЩЋЁЃ
5. Нсгя
MEMSЙпадЕМКНММЪѕОпгааЁаЭЛЏЁЂЕЭГЩБОЕШгХЪЦЃЌдкЙ§ШЅЪ§ЪЎФъФкЕУЕНСЫбИЫйЗЂеЙЃЌдкЮоШЫЯЕЭГСьгђФкЕУЕНСЫдНРДдНЖрЕФгІгУЃЌЦфзїЮЊЮДРДЙпадЕМКНЕФжївЊЗЂеЙЗНЯђЃЌе§дкеЙЯжГіЧПДѓЕФЧБСІвдМАСМКУЕФгІгУЧАОАЁЃБОЮФЛиЙЫСЫMEMSЙпадЕМКНЯЕЭГЗЂеЙРњГЬЃЌзмНсЦфЙиМќММЪѕЃЌВЂЖдMEMSЙпадЕМКНММЪѕЕФгІгУМАЗЂеЙНјааеЙЭћЃЌЮЊMEMSЙпадЕМКНЯЕЭГЕФбаОПЬсЙЉВЮПМЁЃ
ШШУХзЪбЖ
СЊЯЕЮвУЧ
ЕчЛАЃК17513176192
гЪЯфЃКcnsales@winsensor.com
ЕижЗЃКжЃжнЪаИпаТЧјН№ЫѓТЗ299КХ